 電気電子情報系特設サイト
電気電子情報系特設サイト5インチゲージ鉄道の自動制御に関する研究
新型コロナウイルス感染症の流行以降,多くの方々が自粛生活を余儀なくされた。2024年3月現在,イベントなどにおける規制はほぼなくなりつつあるが,変異株や類似の感染症の流行,人々の感染症に対する意識の高まりなどにより,子供が多人数集まっての娯楽を控えることもまだあります。
筆者らは,地域社会の子供たちに希望をもって生きられる環境づくりに貢献しながら,未就学児~小学生にロボメカ技術に興味を持ってもらうことを目的とし,軌間127mmのミニ鉄道車両を製作し,地域の子供たちに乗車体験をしていただく運転会を実施するする取り組みを継続的に行っています。
以下にその様子を示す動画を示します。
最近は、本報では1)車両の加速,減速,停止等の一部自動化および2)運用記録の自動化を目指し,CLAS-GNSSの構成や精度検証など,基本的な検討を行っています。
現在、CLAS GNSSを用いたATS動作の検証を行っています。今後はATC(Automatic Train Control)を含めた、より安心な運転会の実施を支援するシステムの開発を進めていきます。
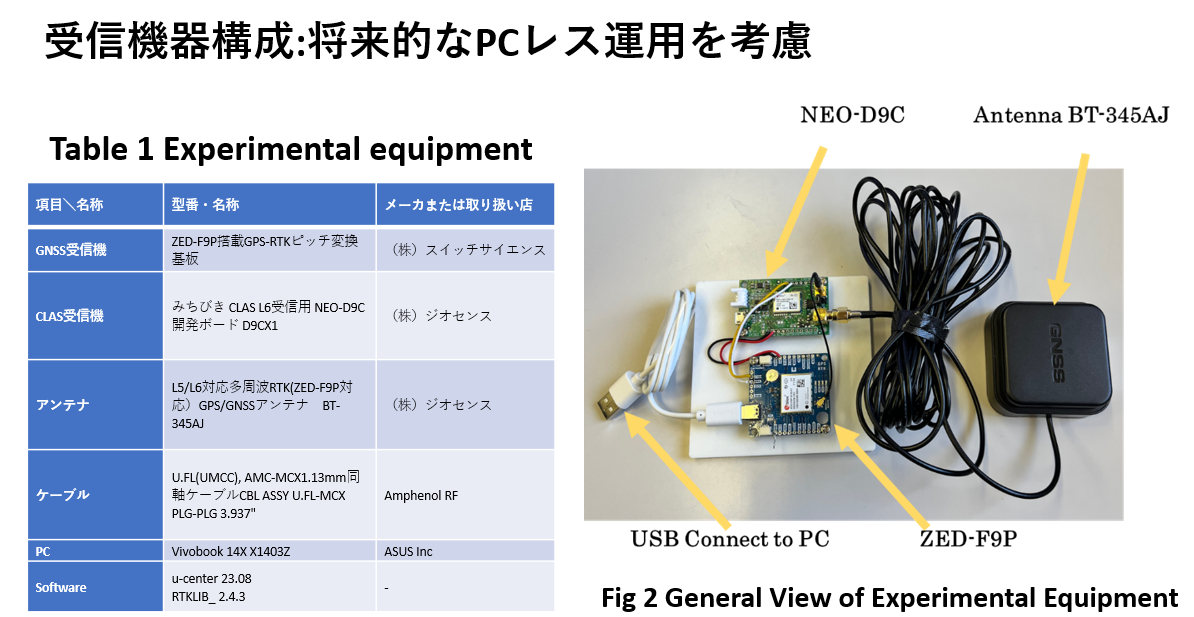
以下は、実験に用いたCLAS-GNSS機器です。ZED-F9PとNEO-D9Cをシリアル信号で直結し、準天頂衛星みちびきからの補正情報を直接NEO-D9CからZED-F9Pに送信して、FIX解を得ることを試みています。
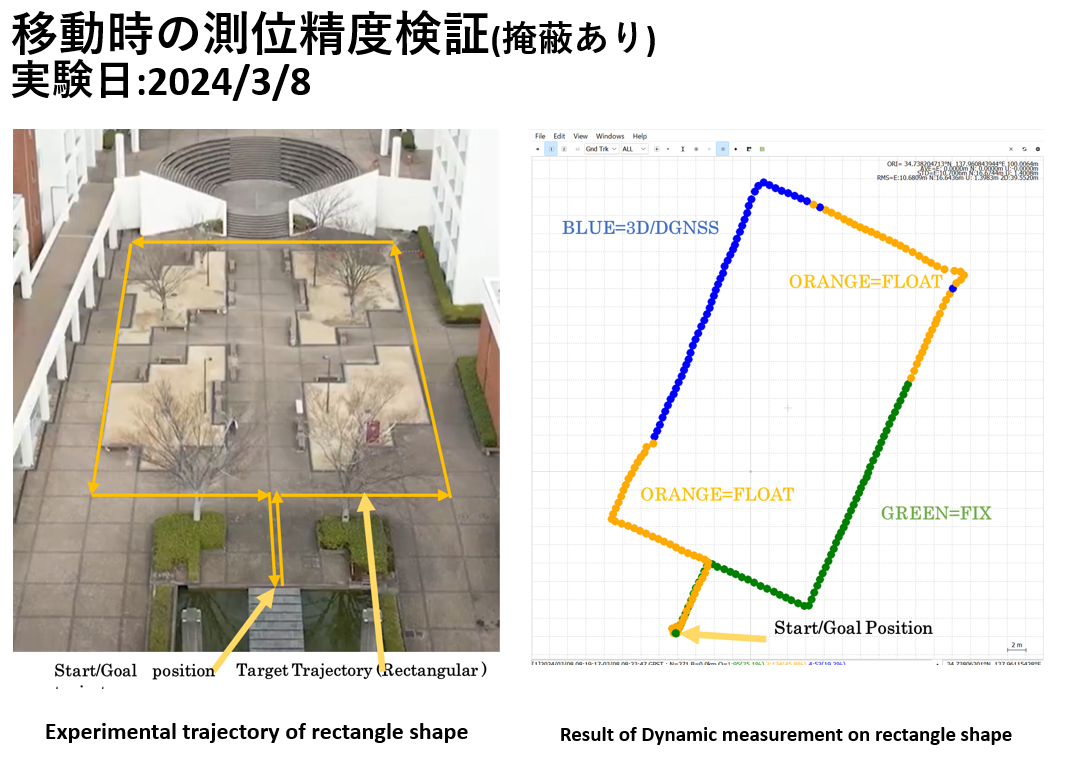
これを台車に乗せて、大学内を手押して動かしてみました。FIXしているところもありましたが、FLOAT解までしか得られない部分も多いようです。準天頂衛星といっても、建物近傍等では少し厳しいようです。
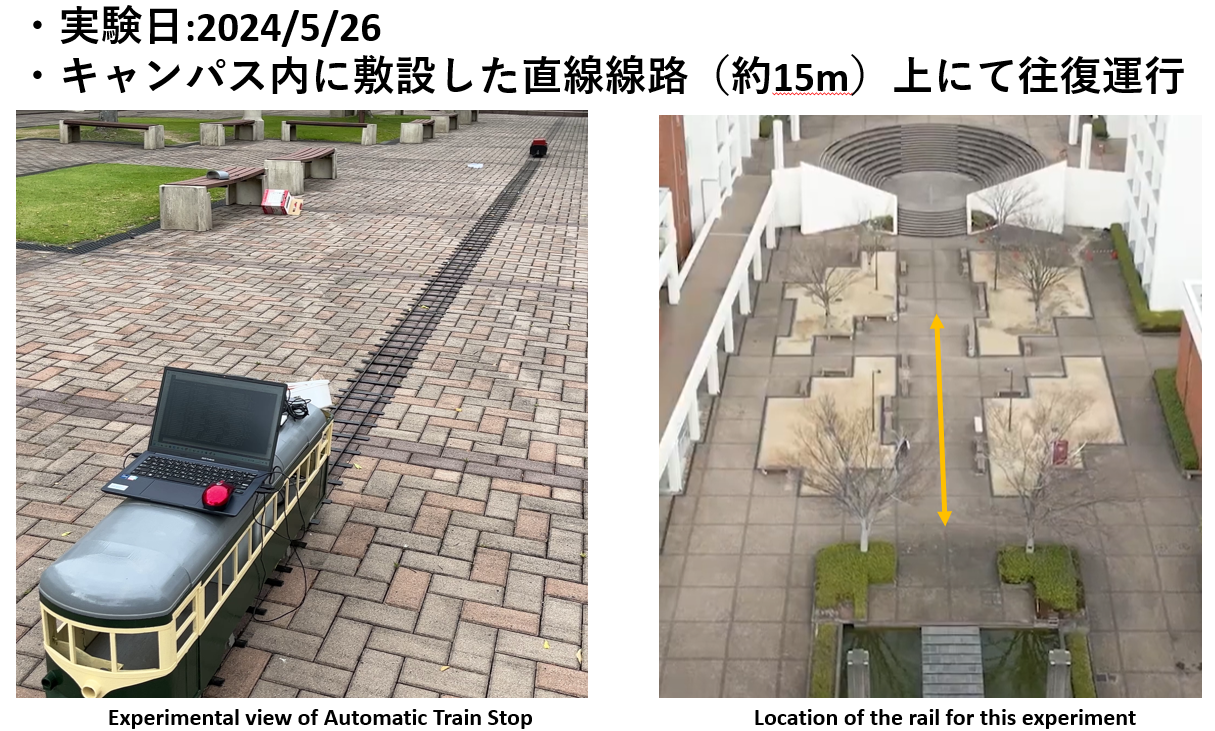
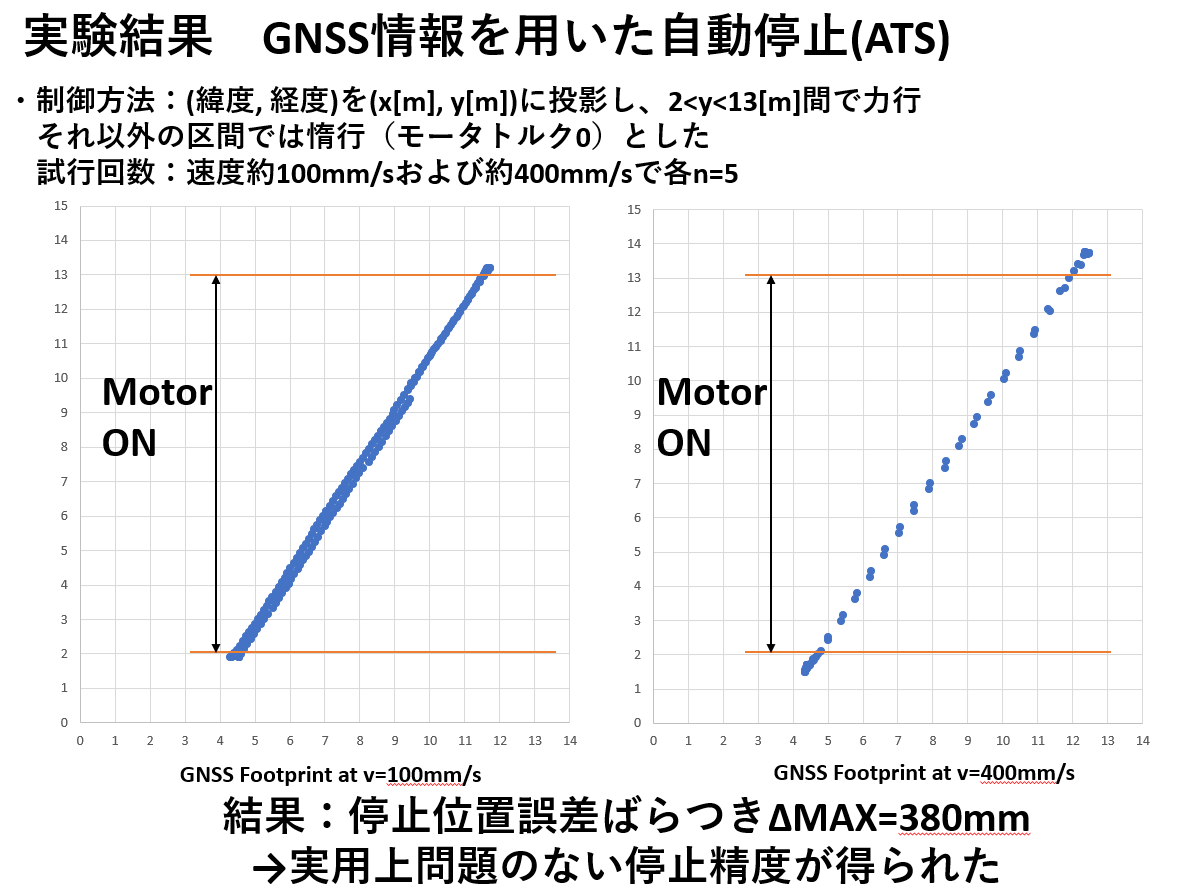
気を取り直して、実際に車両に上記システムを組み込み、モータドライバを制御してATS(Automatic Train Control)実験を行ってみました。結果、±380mm程度の位置誤差で自動停止させることができました。
コースによりますが、なんとか使えるかなと言ったところです。
実験の様子を示す動画です。